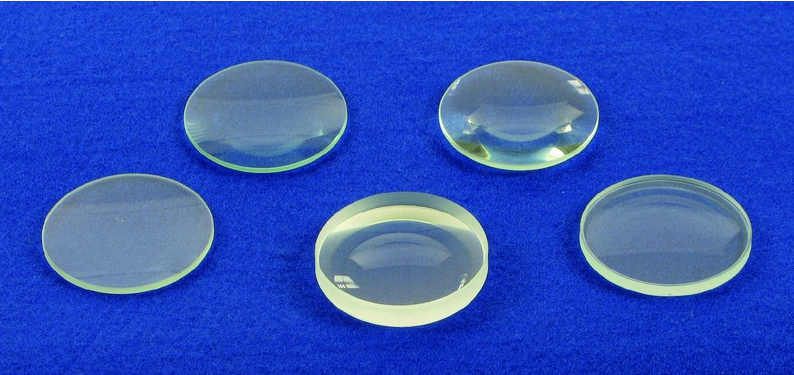
Lentille
Une lentille est constituée d’un matériau transparent limité par deux
surfaces sphériques ou une surface sphérique et une surface plane. Elle
possède un axe de symétrie appelé axe optique. À chacune de ses
surfaces la lumière est réfractée.
Une lentille réfracte donc la lumière deux fois :
- à l’interface air - matériau (lorsque la lumière entre dans la lentille) ;
- à l’interface matériau - air (lorsque la lumière sort de la lentille).
En fonction de la forme de la surface de la lentille, la lumière est réfractée différemment.
Objet et image
Une lentille donne d’un objet une image dont la position et la
taille dépendent de la distance fixée entre l’objet et la lentille.
Précisons la définition d’un objet et d’une image.
[Lire]